Was können moderne Mikroflugroboter?
Aber auch unter Brücken und in Tunneln, in direkter Nähe zu Hochspannungsleitungen, brennenden, giftigen, radioaktiven, absturzgefährdeten und anderen gefährlichen Objekten, die einen Einsatz bemannter Fahr- und Fluggeräte überhaupt nicht oder nur unter Gefährdung von Menschen erlauben, sind Mikroflugroboter imstande, dringend benötigte Informationen operativ und kostengünstig zu liefern.
Die kleinen Drehflügler passen in den Kofferraum eines PKWs, brauchen kaum Platz zum Starten und Landen und können auch in unmittelbarer Nähe zu Personen und Gebäuden eingesetzt werden – Aufstiegserlaubnis vorausgesetzt. An dieser Stelle sei ausdrücklich auf den Datenschutz und den Schutz der Privatsphäre hingewiesen. Die Gesetzeslage im Bezug auf die Nutzung von kleinen UAV ist allerdings noch nicht ausreichend präzisiert.
Bei Videoüberwachung mit Mikroflugrobotern entstehen einige spezifische Probleme, welche die automatische Auswertung des Materials erschweren. Das sind vor allem flugbedingte Vibrationen sowie Störungen, die durch die drahtlose Kommunikation entstehen. Die Ansicht von Oben kann bei manchen Aufgabestellungen ein Problem sein, in anderen Fällen dagegen (z.B. Zählung von Personen bei Großveranstaltungen) macht es die Datenauswertung wesentlich leichter.
Mikroflugroboter unterliegen einer Reihe von wichtigen technischen Einschränkungen. Abgesehen von den relativ kurzen Flugzeiten lassen die Zuverlässigkeit und die Robustheit selbst teurer professioneller Systeme noch stark zu wünschen übrig. Die Wind- und Wetterresistenz ist ebenfalls ein limitierender Faktor – nur bei Windgeschwindigkeiten bis ca. 12 m/s kann ein kleines UAV seine Position zuverlässig halten. Selbst geringfügiger Regen oder Schnee gefährden die teilweise unzureichend geschützte Elektronik und Elektrik. Ein weiteres häufig anzutreffendes Problem stellt die Qualität der Radioübertragung von Steuer- und Sensorinformation dar. Schon seit einigen Jahren überwiegen aber die Vorteile der Einsatzmöglichkeiten – die verbleibenden Probleme werden Schritt für Schritt reduziert.
Mittlerweile sind auch Mikroflugroboter mit Abmessungen von ca. 10 Zentimetern und kleiner verfügbar. Sie wiegen 10-30 Gramm, verfügen intern aber über alle notwendigen Sensoren. Als Beispiel kann man den „Nanokopter“ „Crazyflie“ aus einem ca. 150 Euro teuren und ebenso über Internet erhältlichen Bausatz der Fa. „Bitcraze“ nennen (siehe Abb. 3)8:
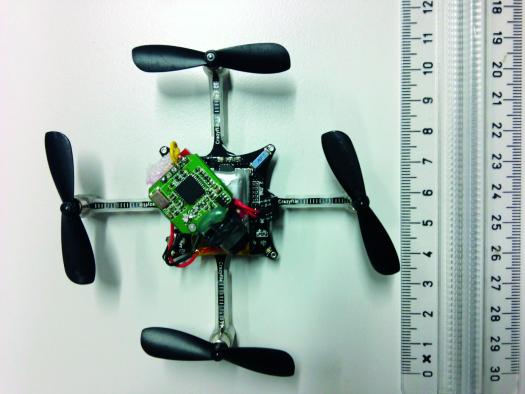
Abbildung 3: „Crazyflie“ mit Kamera aus Bausatz „Bitcraze“
Die geringe Größe und die eingeschränkten Leistungswerte führen zu hoher Windanfälligkeit. Die Sendeleistung schränkt die Reichweite der Steuerung auf ca. 100 Meter ein. Die Flugzeit des „Nanokopters“ mit einer Kamera beträgt lediglich ca. 5 Minuten – das alles macht den Mikroflugroboter eher für eine kurze Indoor-Erkundung als für den Außeneinsatz interessant. Ein autonomer Flug ist zurzeit nur beschränkt möglich, da GPS nicht präzise genug und in Indoor-Anwendungen kaum möglich ist. Eine lokale bildgestützte Navigation ist aufgrund der geringen Rechenleistung bisher keine Alternative. Die Vorteile liegen in der Nutzbarkeit bei eingeschränkten räumlichen Verhältnissen und der geringen Wahrnehmbarkeit. Mit einem solchen Gerät können Stellen erkundet werden, die nur schwer erreichbar oder gefährlich sind. Die Steuerung erfolgt über ein Tablett-PC oder Laptop.
Ein UAV kann insbesondere bei guten Sichtverhältnissen problemlos von einem Handgerät ferngesteuert werden und ein Pilot kann innerhalb weniger Tage darauf vorbereitet werden. Viel schwieriger wird die Aufgabe, wenn man mehrere Fluggeräte gleichzeitig einsetzen muss, z.B. bei der Überwachung größerer Gebiete oder der simultanen Nutzung unterschiedlicher Sensorik in Krisensituationen. Dafür werden spezielle Kontrollsysteme gebraucht, die es ermöglichen, heterogene Sensorik und Sensorträger gemeinsam zu kontrollieren, Sensordaten zu fusionieren, auszuwerten sowie Daten und Auswerteergebnisse bedarfsgerecht zur Verfügung zu stellen. In zivilen und militärischen Szenarien benötigen Einsatzleitung und Stäbe nur selten alle verfügbaren Daten, sondern situationsangepasste verifizierte entscheidungsrelevante Informationen. Diese werden in Form kartenbezogener Lagebilder visualisiert. Durch die gezielte Nutzung mehrerer Sensoren und Sensorträger können ergänzende und verifizierende Informationen zur Lage operativ gewonnen und ausgewertet werden.
An diesen Möglichkeiten arbeitet das Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB. Das Kontrollsystem AMFIS (Aufklärung mit mobilen und ortsfesten Sensoren im Verbund) besteht aus einer mobilen Kontrollstation, welche unterschiedlichste Luft-, Land- und Wasserfahrzeuge (Sensorträger), sowie stationäre Sensornetzwerke und Kameras über eine einheitliche, intuitive Bedienoberfläche steuern und koordinieren kann (siehe Abb. 4)9-11:
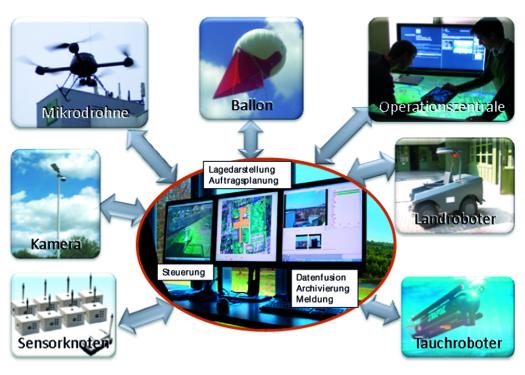
Abbildung 4: Beispielkonfiguration AMFIS
Zu den Hauptaufgaben des Systems gehören die automatische und manuelle Sensorträgerführung, automatische Sensorkontrolle, die örtliche und zeitliche Verknüpfung von Sensordaten, eine kartengestützte, dynamische Lagedarstellung sowie die Archivierung der Daten. Weitere Aufgaben umfassen die Missionsplanung, die bedarfsgerechte Informationsdarstellung (z.B. als Lagebilder, Alarme, Videoströme, Bildteppiche) sowie die Koordination von Einsatzkräften. Eine leichte Vernetzung und Anbindung an bestehende Überwachungssysteme und Einsatzleitzentralen wird ebenso gewährleistet. Die Anpassung an unterschiedliche Szenarien wird durch eine konfigurierbare Regel-Maschine unterstützt.
AMFIS ist modular aufgebaut und daher mit neuen Sensoren und Trägersysteme einfach erweiterbar. Die Benutzungsoberfläche kann auf eine variable Anzahl von stationären und mobilen Arbeitsplätzen verteilt werden. Das System ist leicht zu transportieren und schnell einsatzbereit – nicht zuletzt dank drahtloser Steuerung und Datenübertragung. Drahtlose Kommunikation wird als Basisstandard eingesetzt, was eine Unabhängigkeit von der Kommunikationsinfrastruktur vor Ort gewährleistet. Ist eine größere Fläche zu erkunden, können auch mehrere Kontrollstationen vernetzt gemeinsam betrieben werden.
![]()
Service
Aktivitäten

Aktuelle Ausgabe

Mit ihrem aktuellen und vielfältigen Themenspektrum, einer Mischung aus Theorie und Praxis und einem Team von renommierten Autorinnen und Autoren hat „Die Kriminalpolizei“ sich in den vergangenen Jahren einen ausgezeichneten Ruf erworben.
Erklärung einschlägiger Präventions-Begriffe
Meist gelesene Artikel





RSS Feed PolizeiDeinPartner.de
PolizeideinPartner.de - Newsfeed
-
Teure Bußgelder
Verkehrsverstöße in der Schweiz werden in Deutschland vollstreckt
-
Gewalterfahrungen in der Grundschule
Wohlbefinden und Lesekompetenz von Kindern gefährdet
-
Pollensaison startet früher als sonst
Heuschnupfen hat Auswirkungen auf die Fahrtüchtigkeit
-
Polizeiliche Kriminalstatistik 2023
Gewalt-, Jugend- und Ausländerkriminalität sind gestiegen
-
Wie Betrüger Künstliche Intelligenz nutzen
Wenn uns jemand darauf aufmerksam macht, dass eine Überweisung getätigt wurde, die wir nicht...
-
Datenklau durch Scraping
Es gehört mittlerweile schon zur Normalität des Internets, dass immer wieder Fälle von...
-
Mehr Falschgeld in Deutschland
Ein Dutzend Vermögende sind 2023 in Deutschland beim Barverkauf ihrer teuren Uhren oder Autos von...