
Was können moderne Mikroflugroboter?
Von Dr.-Ing. Igor Tchouchenkov, Dr.-Ing. Rainer Schönbein und Florian Segor, alle vom Frauenhofer Institut Karlsruhe
Mikroflugroboter finden immer häufiger Anwendung in unterschiedlichsten Bereichen – nicht zuletzt deshalb, weil sie mit jedem Jahr leistungsfähiger, günstiger und damit auch zugänglicher werden1. Im Bereich der Sicherheitstechnik sind die luftgestützte Erkundung und Überwachung von großen Liegenschaften, Infrastruktur und Veranstaltungen, aber auch in schwer zugänglichen Arealen und in Katastrophengebieten nur einige Beispiele für aktuelle Anwendungen.

Die Flugroboter dienen als fliegende Trägerplattformen für Video- und IR-Kameras, Scanner, Radiometer, Gasdetektoren, Mikrofone und andere Sensoren. Daneben sammeln sie meteorologische Daten, dienen als Transporter für kleine abzusetzende Sensoren oder andere Gegenstände. Andererseits wird diese Technik mehr und mehr auch privat eingesetzt – leider nicht immer zum Wohle der Gemeinschaft2.
Bei Fluggeräten unterscheidet man anhand ihrer Auftriebsart zwischen Drehflüglern und Starrflüglern. Der Auftrieb eines Drehflüglers entsteht hauptsächlich durch mindestens einen, um eine (nahe)vertikale Achse drehenden, Rotor. Der Vortrieb kann sowohl von den motorisierten Rotoren (siehe Abb. 1) als auch von zusätzlichen Propellern kommen. Drehflügler können vertikal starten und landen, sich in jede Richtung bewegen sowie eine statische Position in der Luft annehmen.

Zu Starrflüglern zählen vor allem Propeller- und Strahlflugzeuge, deren Auftrieb hauptsächlich durch Luftströmungen an Flügeln entsteht. Starrflügler können nicht rückwärts fliegen und dürfen eine vom Flugzeugtyp abhängige Minimalgeschwindigkeit nicht unterschreiten (sonst droht der Absturz), sind dafür aber imstande, relativ große Entfernungen zurück zu legen. Sie brauchen i.d.R. relativ lange Start- und Landebahnen oder spezielle Vorrichtungen. Starrflügler sind bei gleicher Antriebsleistung meistens schneller als Drehflügler, haben längere Flugzeiten und sind weniger witterungsempfindlich.
In den Medien wird für die Bezeichnung der unbemannten Fluggeräte gelegentlich der Begriff „Drohne“ verwendet. In der Fachszene ist aber die Abkürzung UAV (Unmanned Aerial Vehicle) gebräuchlicher.

Die Bezeichnung UAS (Unmanned Aircraft System) umfasst das Gesamtsystem aus dem fliegenden UAV, der (Boden)Station zum Start und ggf. zur Landung, sowie der Station zur Führung und Überwachung des Fluges.
Ein UAV wird i.d.R. durch Funksignale ferngesteuert.
Die Reichweite der Steuerung und der Datenübertragung übersteigt in zivilem Bereich selten 2 km – abgesehen von wenigen Spezialsystemen mit wesentlich stärkeren Sendern. Einige Systeme können auch vorgegebene Routen automatisch abfliegen – meistens GPS-basiert. Die Positionsgenauigkeit der GPS-basierten Navigation beträgt ca. 3-5 Meter, was für viele Anwendungen ausreichend ist. Wird eine präzisere Navigation benötigt, können DGPS- oder kamerabasierte Positionierung zum Einsatz kommen. Letztere ist aber noch teuer, braucht viel Rechenleistung und ist dazu relativ störungsanfällig. Sind präzisere Flugmanöver vonnöten, werden die Flugsysteme in der Regel vom Boden aus durch einen geschulten Piloten gesteuert.

Abbildung 1: „Oktokopter XL“ aus Bausatz „HiSystems“
Abmessungen der modernen Flugroboter reichen von einigen Millimetern bis zu über 60 m Spannweite. Im zivilen Bereich kommen am häufigsten kleine Drehflügler mit Abmessungen von unter 1 Meter und Elektroantrieb zum Einsatz. 4, 6 oder 8 Elektromotoren sind der Regelfall und bei einem Eigengewicht von maximal 1-2 Kilo können diese Flugsysteme bis zu 1 Kilogramm Nutzlast tragen – am häufigsten ist das eine Kamera. Die Mikroflugroboter sind sehr manövrierfähig, präzise steuerbar und erreichen Fluggeschwindigkeiten je nach Typ von 50-80 km/h, was bei der Flughöhe von über 100 Meter und einer Flugdauer bis ca. 30 Minuten eine schnelle Erkundung auch größerer Gebiete ermöglicht. Wird eine dauerhafte Beobachtung eines bestimmten Bereiches benötigt, kann man einen Mikroflugroboter an einer passenden Stelle landen und damit eine mögliche Beobachtungsdauer deutlich verlängern. Es gibt „professionelle“ UAVs, deren Preise im Bereich von einigen zehntausend Euro liegen3-4, aber mittlerweile auch kostengünstige Systeme,häufig in Form von Bausätzen, die durchaus mit professionellen Systemen mithalten können5-7. In Abb. 1 ist ein „Oktokopter XL“ aus einem ca. 2000 Euro teuren über Internet erhältlichen Bausatz der Fa. „HiSystems“ zu sehen, der bei Abmessungen von 1 m und einem Eigengewicht von ca. 2500 g mit einer Nutzlast von über 1 kg und Geschwindigkeit bis ca. 80 km/h fliegen kann.
UAVs unterschiedlicher Typen kommen bei Ordnungs- und Rettungskräften immer häufiger zum Einsatz. Vor allem ist ihre Fähigkeit gefragt, schnell, preiswert und auch relativ unauffällig einen Überblick von oben zu verschaffen. Die aufgenommenen Bilder und Videos können gespeichert werden oder über eine drahtlose Verbindung übertragen werden sowie ggf. über Internet autorisierten Benutzern zur Verfügung gestellt werden. Einzelne Bilder können automatisch zu einem Mosaik („Bildteppich“) fusioniert werden, dies bildet eine gute Grundlage zur operativen Lagedarstellung (siehe Abb. 2).

Abbildung 2: Ein hochauflösender „Bildteppich“ aus mehreren Bildern
Aber auch unter Brücken und in Tunneln, in direkter Nähe zu Hochspannungsleitungen, brennenden, giftigen, radioaktiven, absturzgefährdeten und anderen gefährlichen Objekten, die einen Einsatz bemannter Fahr- und Fluggeräte überhaupt nicht oder nur unter Gefährdung von Menschen erlauben, sind Mikroflugroboter imstande, dringend benötigte Informationen operativ und kostengünstig zu liefern.
Die kleinen Drehflügler passen in den Kofferraum eines PKWs, brauchen kaum Platz zum Starten und Landen und können auch in unmittelbarer Nähe zu Personen und Gebäuden eingesetzt werden – Aufstiegserlaubnis vorausgesetzt. An dieser Stelle sei ausdrücklich auf den Datenschutz und den Schutz der Privatsphäre hingewiesen. Die Gesetzeslage im Bezug auf die Nutzung von kleinen UAV ist allerdings noch nicht ausreichend präzisiert.
Bei Videoüberwachung mit Mikroflugrobotern entstehen einige spezifische Probleme, welche die automatische Auswertung des Materials erschweren. Das sind vor allem flugbedingte Vibrationen sowie Störungen, die durch die drahtlose Kommunikation entstehen. Die Ansicht von Oben kann bei manchen Aufgabestellungen ein Problem sein, in anderen Fällen dagegen (z.B. Zählung von Personen bei Großveranstaltungen) macht es die Datenauswertung wesentlich leichter.
Mikroflugroboter unterliegen einer Reihe von wichtigen technischen Einschränkungen. Abgesehen von den relativ kurzen Flugzeiten lassen die Zuverlässigkeit und die Robustheit selbst teurer professioneller Systeme noch stark zu wünschen übrig. Die Wind- und Wetterresistenz ist ebenfalls ein limitierender Faktor – nur bei Windgeschwindigkeiten bis ca. 12 m/s kann ein kleines UAV seine Position zuverlässig halten. Selbst geringfügiger Regen oder Schnee gefährden die teilweise unzureichend geschützte Elektronik und Elektrik. Ein weiteres häufig anzutreffendes Problem stellt die Qualität der Radioübertragung von Steuer- und Sensorinformation dar. Schon seit einigen Jahren überwiegen aber die Vorteile der Einsatzmöglichkeiten – die verbleibenden Probleme werden Schritt für Schritt reduziert.
Mittlerweile sind auch Mikroflugroboter mit Abmessungen von ca. 10 Zentimetern und kleiner verfügbar. Sie wiegen 10-30 Gramm, verfügen intern aber über alle notwendigen Sensoren. Als Beispiel kann man den „Nanokopter“ „Crazyflie“ aus einem ca. 150 Euro teuren und ebenso über Internet erhältlichen Bausatz der Fa. „Bitcraze“ nennen (siehe Abb. 3)8:
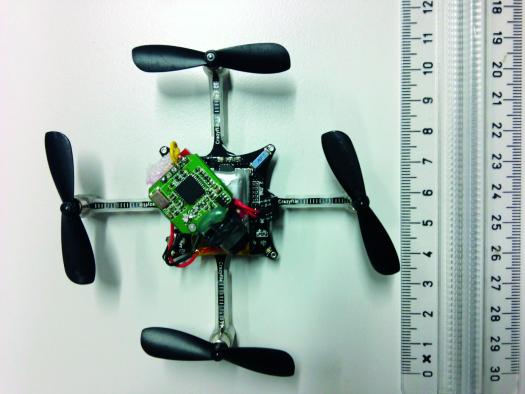
Abbildung 3: „Crazyflie“ mit Kamera aus Bausatz „Bitcraze“
Die geringe Größe und die eingeschränkten Leistungswerte führen zu hoher Windanfälligkeit. Die Sendeleistung schränkt die Reichweite der Steuerung auf ca. 100 Meter ein. Die Flugzeit des „Nanokopters“ mit einer Kamera beträgt lediglich ca. 5 Minuten – das alles macht den Mikroflugroboter eher für eine kurze Indoor-Erkundung als für den Außeneinsatz interessant. Ein autonomer Flug ist zurzeit nur beschränkt möglich, da GPS nicht präzise genug und in Indoor-Anwendungen kaum möglich ist. Eine lokale bildgestützte Navigation ist aufgrund der geringen Rechenleistung bisher keine Alternative. Die Vorteile liegen in der Nutzbarkeit bei eingeschränkten räumlichen Verhältnissen und der geringen Wahrnehmbarkeit. Mit einem solchen Gerät können Stellen erkundet werden, die nur schwer erreichbar oder gefährlich sind. Die Steuerung erfolgt über ein Tablett-PC oder Laptop.
Ein UAV kann insbesondere bei guten Sichtverhältnissen problemlos von einem Handgerät ferngesteuert werden und ein Pilot kann innerhalb weniger Tage darauf vorbereitet werden. Viel schwieriger wird die Aufgabe, wenn man mehrere Fluggeräte gleichzeitig einsetzen muss, z.B. bei der Überwachung größerer Gebiete oder der simultanen Nutzung unterschiedlicher Sensorik in Krisensituationen. Dafür werden spezielle Kontrollsysteme gebraucht, die es ermöglichen, heterogene Sensorik und Sensorträger gemeinsam zu kontrollieren, Sensordaten zu fusionieren, auszuwerten sowie Daten und Auswerteergebnisse bedarfsgerecht zur Verfügung zu stellen. In zivilen und militärischen Szenarien benötigen Einsatzleitung und Stäbe nur selten alle verfügbaren Daten, sondern situationsangepasste verifizierte entscheidungsrelevante Informationen. Diese werden in Form kartenbezogener Lagebilder visualisiert. Durch die gezielte Nutzung mehrerer Sensoren und Sensorträger können ergänzende und verifizierende Informationen zur Lage operativ gewonnen und ausgewertet werden.
An diesen Möglichkeiten arbeitet das Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB. Das Kontrollsystem AMFIS (Aufklärung mit mobilen und ortsfesten Sensoren im Verbund) besteht aus einer mobilen Kontrollstation, welche unterschiedlichste Luft-, Land- und Wasserfahrzeuge (Sensorträger), sowie stationäre Sensornetzwerke und Kameras über eine einheitliche, intuitive Bedienoberfläche steuern und koordinieren kann (siehe Abb. 4)9-11:
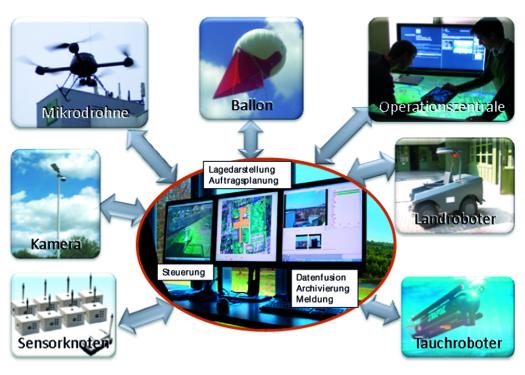
Abbildung 4: Beispielkonfiguration AMFIS
Zu den Hauptaufgaben des Systems gehören die automatische und manuelle Sensorträgerführung, automatische Sensorkontrolle, die örtliche und zeitliche Verknüpfung von Sensordaten, eine kartengestützte, dynamische Lagedarstellung sowie die Archivierung der Daten. Weitere Aufgaben umfassen die Missionsplanung, die bedarfsgerechte Informationsdarstellung (z.B. als Lagebilder, Alarme, Videoströme, Bildteppiche) sowie die Koordination von Einsatzkräften. Eine leichte Vernetzung und Anbindung an bestehende Überwachungssysteme und Einsatzleitzentralen wird ebenso gewährleistet. Die Anpassung an unterschiedliche Szenarien wird durch eine konfigurierbare Regel-Maschine unterstützt.
AMFIS ist modular aufgebaut und daher mit neuen Sensoren und Trägersysteme einfach erweiterbar. Die Benutzungsoberfläche kann auf eine variable Anzahl von stationären und mobilen Arbeitsplätzen verteilt werden. Das System ist leicht zu transportieren und schnell einsatzbereit – nicht zuletzt dank drahtloser Steuerung und Datenübertragung. Drahtlose Kommunikation wird als Basisstandard eingesetzt, was eine Unabhängigkeit von der Kommunikationsinfrastruktur vor Ort gewährleistet. Ist eine größere Fläche zu erkunden, können auch mehrere Kontrollstationen vernetzt gemeinsam betrieben werden.
Fazit
Mikroflugroboter können für sicherheitsrelevante Aufgaben auf unterschiedlichste Weise eingesetzt werden. Die Typenvielfalt, die Möglichkeiten und entsprechend die Verwendung dieser Systeme nehmen schnell zu – nicht zuletzt dank der Erweiterung ihrer Möglichkeiten und der Verbesserung ihrer Wirtschaftlichkeit. Der Nutzen der UAVs hängt von ihrer Art und der Anwendung ab und muss situationsbezogen analysiert werden.
Besonders schwierig ist ein koordinierter Einsatz mehrerer unterschiedlicher UAVs – dafür müssen spezielle Systeme eingesetzt werden, die heute noch Forschungsgegenstand sind. Dabei bildet die Interoperabilität bezüglich Daten und Schnittstellen eine besondere Herausforderung.
Literatur
- www.tagesspiegel.de/politik/drohneneinsatz-im-inland-die-fliegenden-augen/8492908.html
- www.spiegel.de/panorama/norweger-90-verletzte-bei-brand-in-historischer-stadt-a-944330.html
- www.airrobot.com
- www.microdrones.com
- www.hisystems.de
- www.service-drone.de
- aeroquad.com
- www.bitcraze.se
- Tchouchenkov, I. Segor, F., Schönbein, R.: Einsatzmöglichkeiten und Abwehr kleiner unbemannter Fluggeräte, POLIZEI-heute, Nr. 3, 2012.
- Bürkle, A., Segor, F., Kollmann, M.: Towards Autonomous Micro UAV Swarms, Journal Intelligent Robot Systems, 2011, 61(1-4): pp.339-353, Springer Science+Business Media B.V.
- Santamaria, E., Segor, F., Tchouchenkov, I.: Rapid Aerial Mapping with Multiple Heterogeneous Unmanned Vehicles, Proceedings of the 10th International ISCRAM Conference – Baden-Baden, Germany, May 2013.